O projektu
Projekt održan 2014. godine
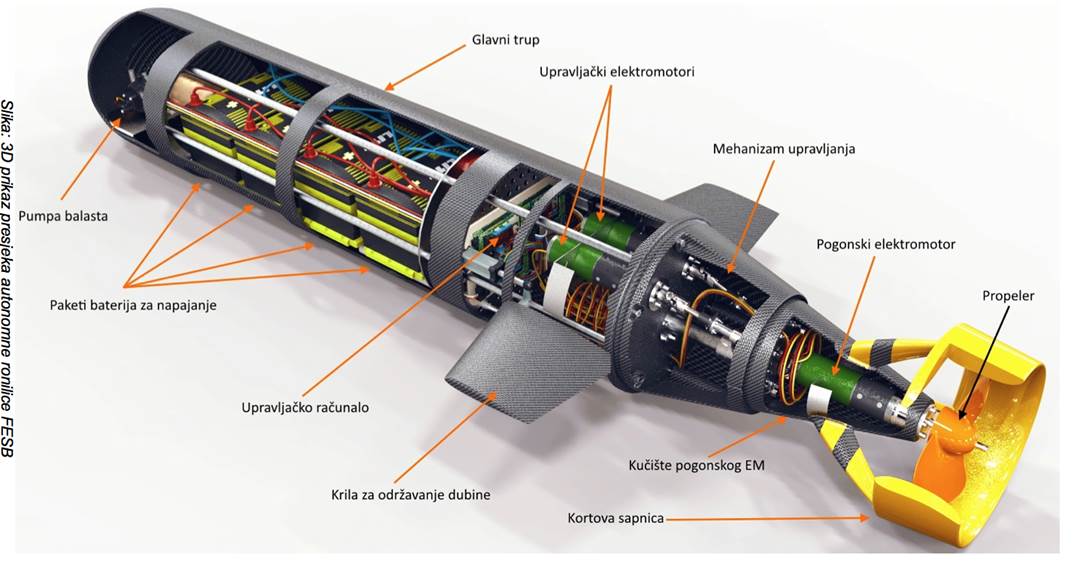
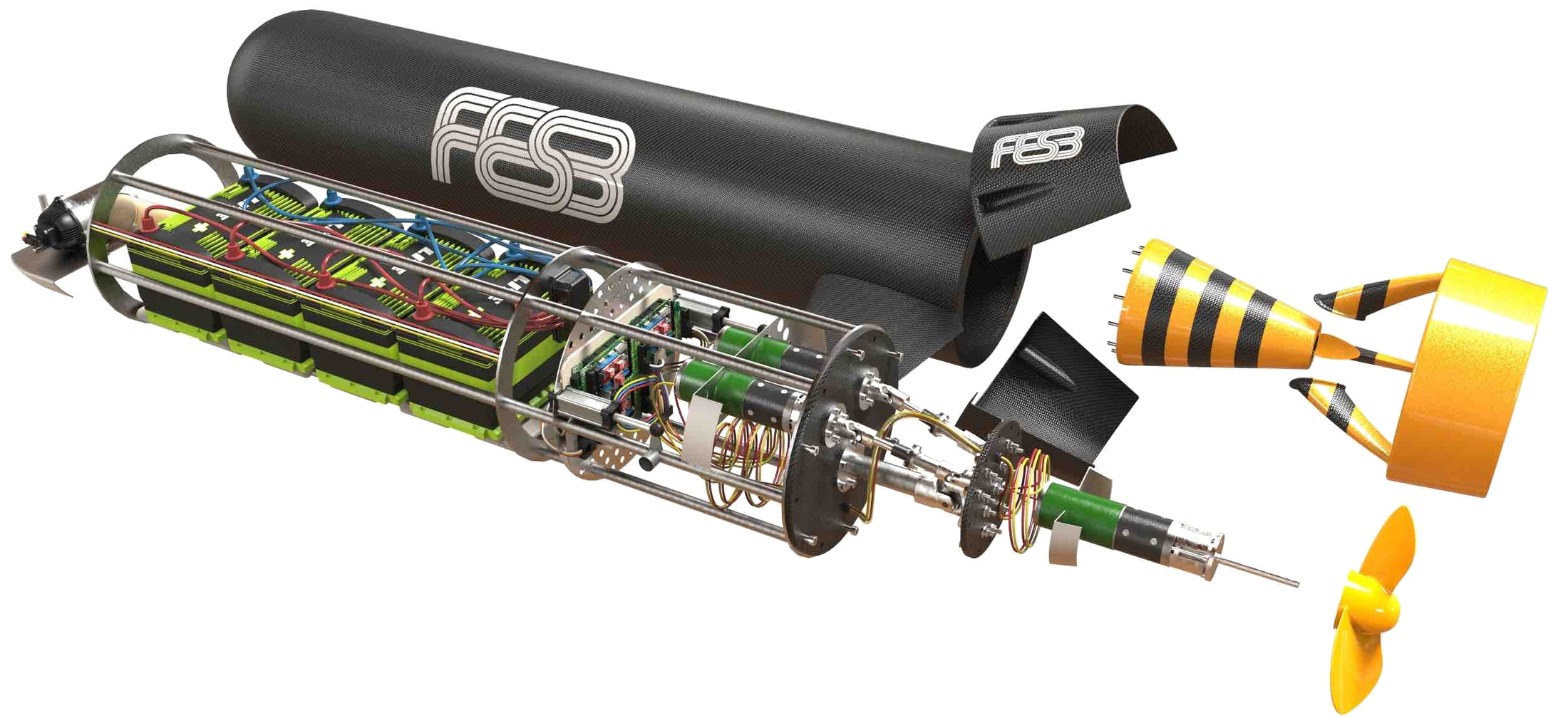
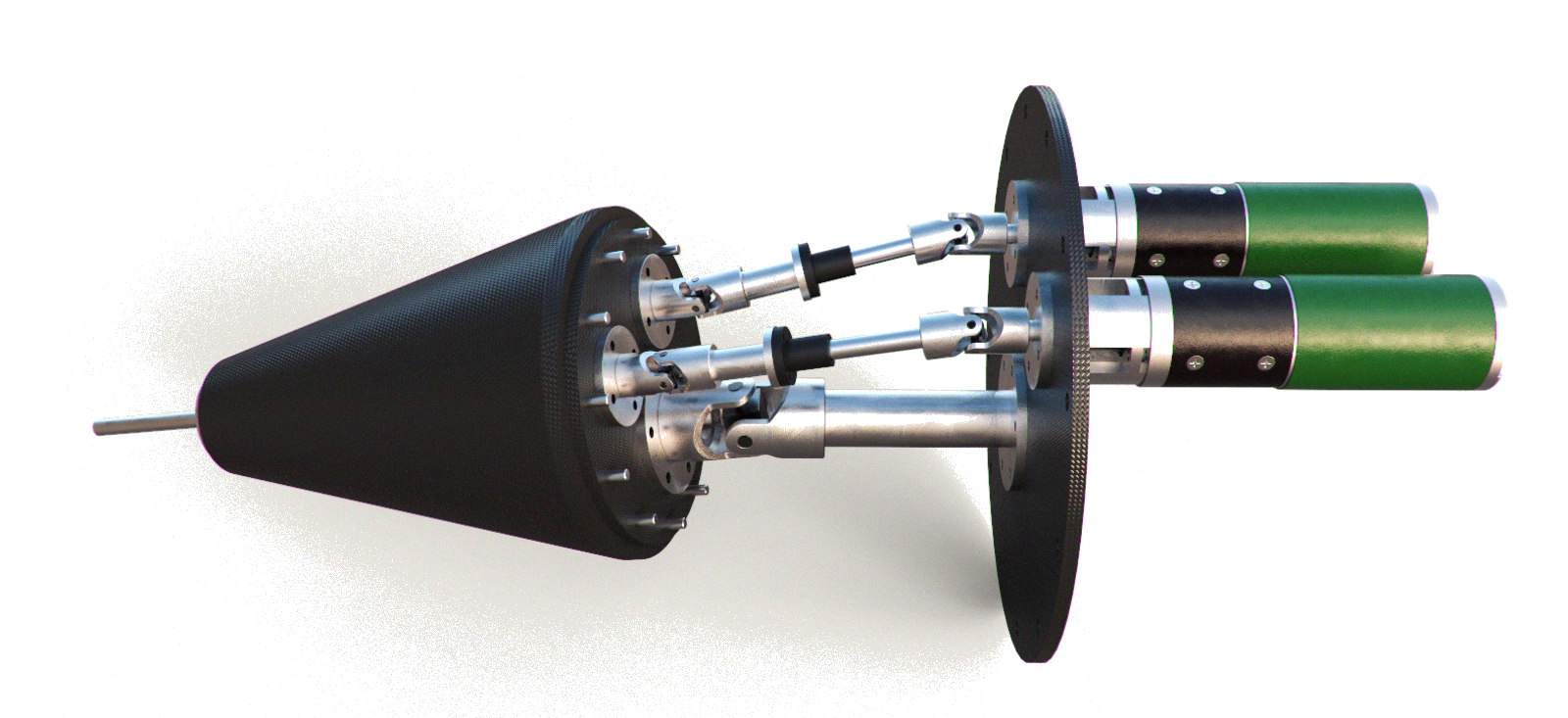
Projekt se temelji na interdisciplinarnom istraživanju na područjima brodogradnje i elektrotehnike/računarstva koje će objediniti rad na istraživanju autonomnih bespilotnih plovila i rad na istraživanju tehnologija za pametne okoline – smart environment technologies. Istraživanja su fokusirana na podvodna plovila, ronilice i jedrilice, čiji je razvoj znatno ubrzan posljednih desetak godina te se očekuje njihova značajna komercijalizacija. Cilj je razvoj i izrada autonomne ronilice energetski efikasnog propulzijskog sustava opremljene naprednim sustavom za određivanje položaja u okolnom terenu. Razvoj naprednog sustava za određivanje položaja uključivat će niz istraživanja temeljenih na određivanju položaja pomoću akustičkih senzora, radio valova, inercijskih senzora, te prepoznavanju objekata u slici. Povezivanje sustava senzora i propulzijskog sustava ostvarit će se izradom algoritma koji će, na temelju podataka očitanih senzorima, upravljati ronilicom. Ronilica će biti projektirana za rad u unutarnjim vodama Jadranskog mora, na dubinama do 500m, a energetska efikasnost propulzije uključivat će niz istraživanja, od postizanja malog otpora trupa do mogućnosti korištenja energije iz okoline. U prvoj godini planirane je izrada trupa i propulzijskog sustava. Materijal trupa je karbon kompozit, a propulzijski sustav se sastoji od izvora energije (baterije), aktuatora/motora i zakretljivog krmenog dijela trupa s fiksnim propelerom (swivel thruster). Modeli propelera izrađuju se na 3D printeru. Cilj je u prvoj godini izraditi digitalni model terena te računalnu simulaciju sustava za određivanje položaja. Za stvarno određivanje položaja u podvodnom okruženju istražit će se mogućnosti primjene algoritama i tehnologija razvijenih za smart okoline uključujući akustičke senzore, radio valove, inercijske senzore i kamere.